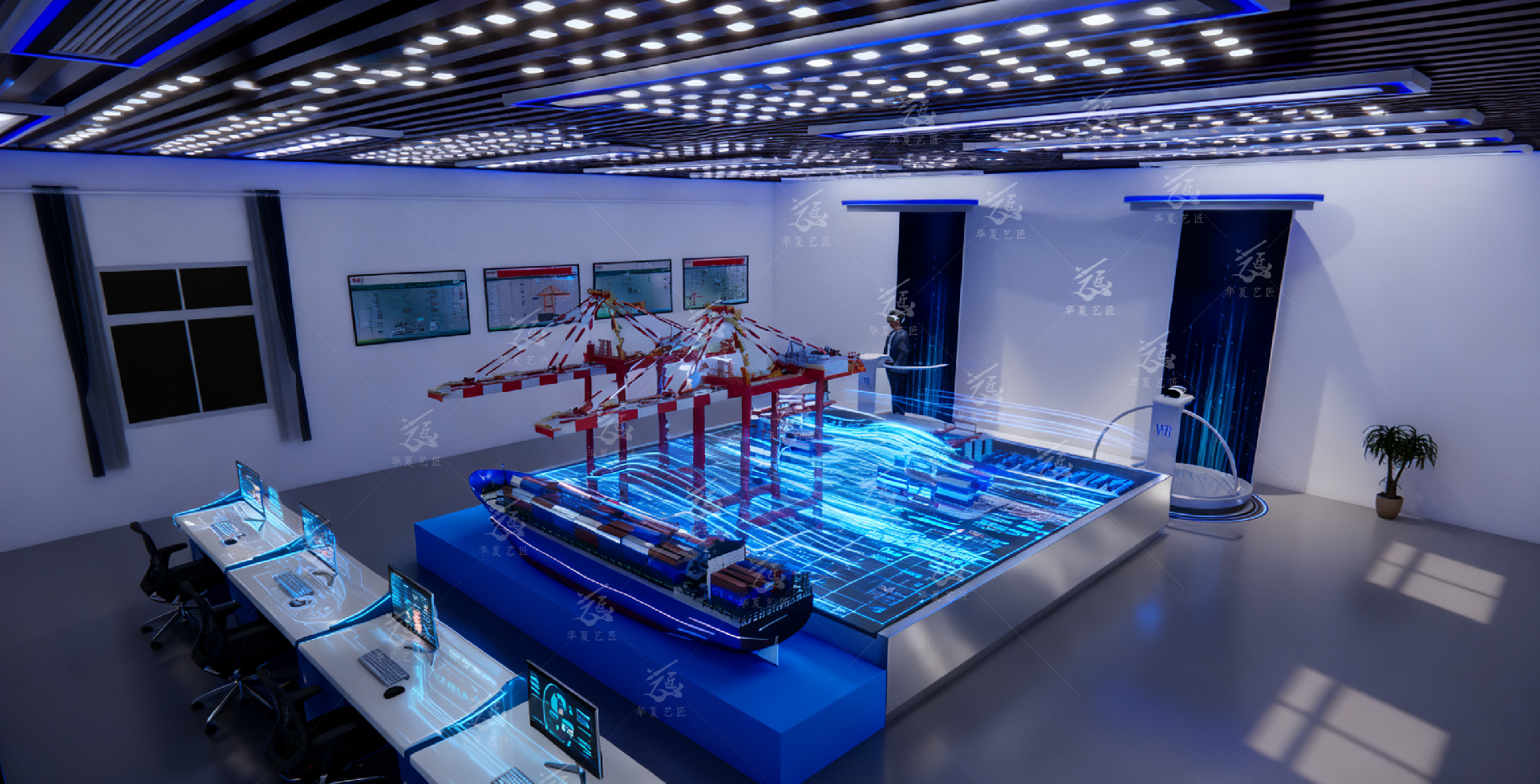
(一)模型核心构成
自动化堆场龙门吊(轨道吊)
模型中包含多台不同配色(蓝、绿、黄、青)的等比例龙门吊,为核心作业单元,采用动态机械结构设计,可模拟集装箱的抓取、升降、平移与堆存动作,还原真实设备的作业轨迹与动作逻辑。龙门吊的框架、行走机构、吊具等细节均按工业设备标准复刻,关节活动误差控制在 0.1 度以内,保证动态演示的流畅性与真实性。
标准化集装箱单元
模型中布置了大量色彩区分的集装箱模型,以不同颜色区分箱型 / 货种,整齐排列于模拟堆场区域,还原真实码头的堆存布局。集装箱采用模块化设计,可与龙门吊的吊具精准配合,实现动态装卸演示,直观展示不同箱位、不同堆高的作业逻辑。
码头堆场与道路系统
沙盘地面以灰色为基底,复刻了真实码头的堆场分区、水平运输通道、车道标线等布局,清晰划分作业区域与通行路线,还原自动化码头 “堆场 - 水平运输 - 岸桥” 的空间动线逻辑,为全流程作业模拟提供基础场景支撑。

(二)核心功能与应用场景
港口作业全流程动态演示
模型可联动龙门吊等设备,模拟集装箱从岸桥卸船后,经水平运输至堆场、由轨道吊完成堆存 / 取箱的完整流程,直观呈现自动化码头 “无人化、高效率” 的作业模式,清晰展示各环节的衔接逻辑与调度关系。
教学实训与科普展示
作为港口物流教学沙盘,模型可帮助学习者理解集装箱码头的核心设备功能、作业流程与调度逻辑,解决传统教学中抽象概念难以理解的问题;同时适用于港口科普展馆、行业展会,向大众直观展示智慧港口的技术特点与运营模式。
方案推演与优化验证
模型可结合不同的堆场布局、设备配置,进行作业场景的模拟推演,辅助港口运营方案的优化与验证,为流程优化、瓶颈分析提供可视化参考,降低真实场景的试错成本。

(三)制作工艺与技术特点
高精度实体复刻
采用激光切割、精雕雕刻等先进工艺,模型制作精度控制在 0.05 毫米以内,设备的结构细节、集装箱的外观特征、码头的道路标线均高度还原真实场景,保证模型的工业质感与还原度。
动态与智能控制结合
设备采用机械传动与电子控制结合的方式,可实现动作的精准控制与联动演示,部分场景可搭配智能调度系统,模拟真实港口的设备调度逻辑,提升模型的互动性与专业性。
模块化可扩展设计
模型的龙门吊、堆场、道路等模块可根据需求进行调整与扩展,适配不同规模、不同工艺的码头场景,支持后续功能升级与场景迭代,满足多样化的应用需求。