




一、动态模型核心升级定位
以 “自动化设备动态演示 + 智能调度实时仿真 + 虚实联动教学” 为核心,新增三大教学目标:
掌握自动化码头核心设备(无人岸桥、AGV、自动化堆场)的动态工作原理
理解智能调度系统(路径规划、任务分配、冲突规避)的实时决策逻辑
熟悉数字孪生技术在自动化码头的动态应用流程
二、两大核心模型动态化升级
(一)虚拟仿真实训系统(智能调度增强型)
核心技术升级
智能调度算法:嵌入遗传算法(GA)+ 改进 A * 算法,实现 AGV 路径动态规划、泊位 - 岸桥 - 堆场任务实时分配
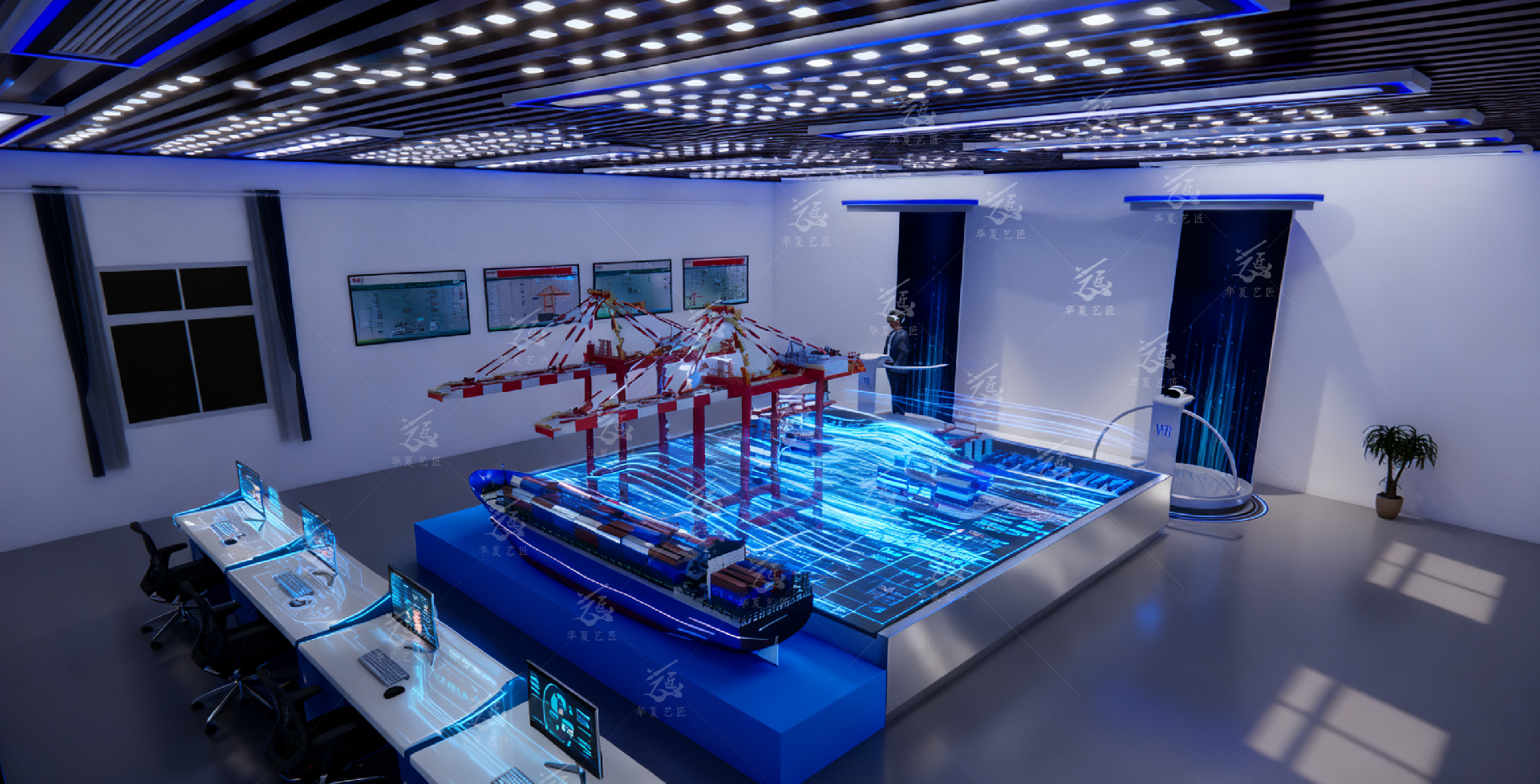
数字孪生联动:建立虚拟模型与物理沙盘的 TCP/IP 数据交互通道,支持设备状态实时同步(延迟≤50ms)
动态数据可视化:新增实时监控面板,展示 AGV 运行轨迹、设备负载率、作业效率等动态指标
新增动态功能模块
模块 | 动态教学内容 | 操作形式 |
自动化设备操作 | 无人岸桥自动对位、AGV 自主避障、自动化龙门吊(ARMG)堆取箱 | 算法参数调整 + 实时模拟运行 |
智能调度仿真 | 多 AGV 冲突规避、紧急任务插入调度、潮汐式作业动态优化 | 场景参数配置 + 调度结果动态演示 |
故障动态处置 | AGV 电池低电量自动返航、岸桥故障备用设备补位 | 故障触发 + 系统自动响应演示 |
数字孪生监控 | 虚拟场景与物理沙盘设备动作 1:1 同步、数据实时映射 | 双屏联动观察 + 操作同步控制 |
思政元素动态融入
实时调取洋山港四期自动化码头作业数据(如单机每小时装卸效率≥40 自然箱),对比传统码头动态效率曲线
模拟 “一带一路” 沿线港口自动化协作场景,动态展示跨境物流时效优化
(二)物理沙盘模型(自动化设备动态型)
规格与结构升级
保留原有尺寸框架,核心设备替换为自动化类型:
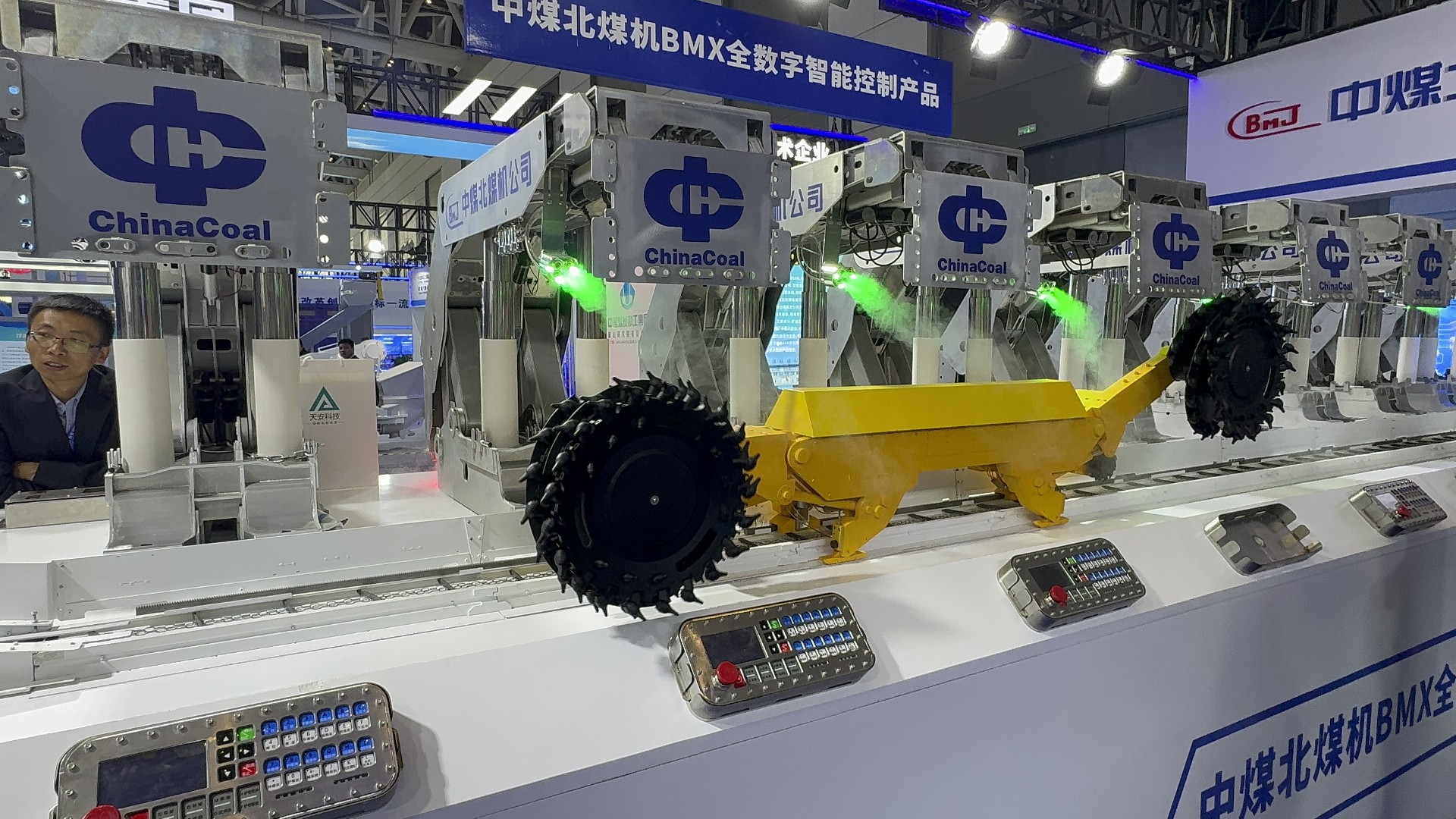
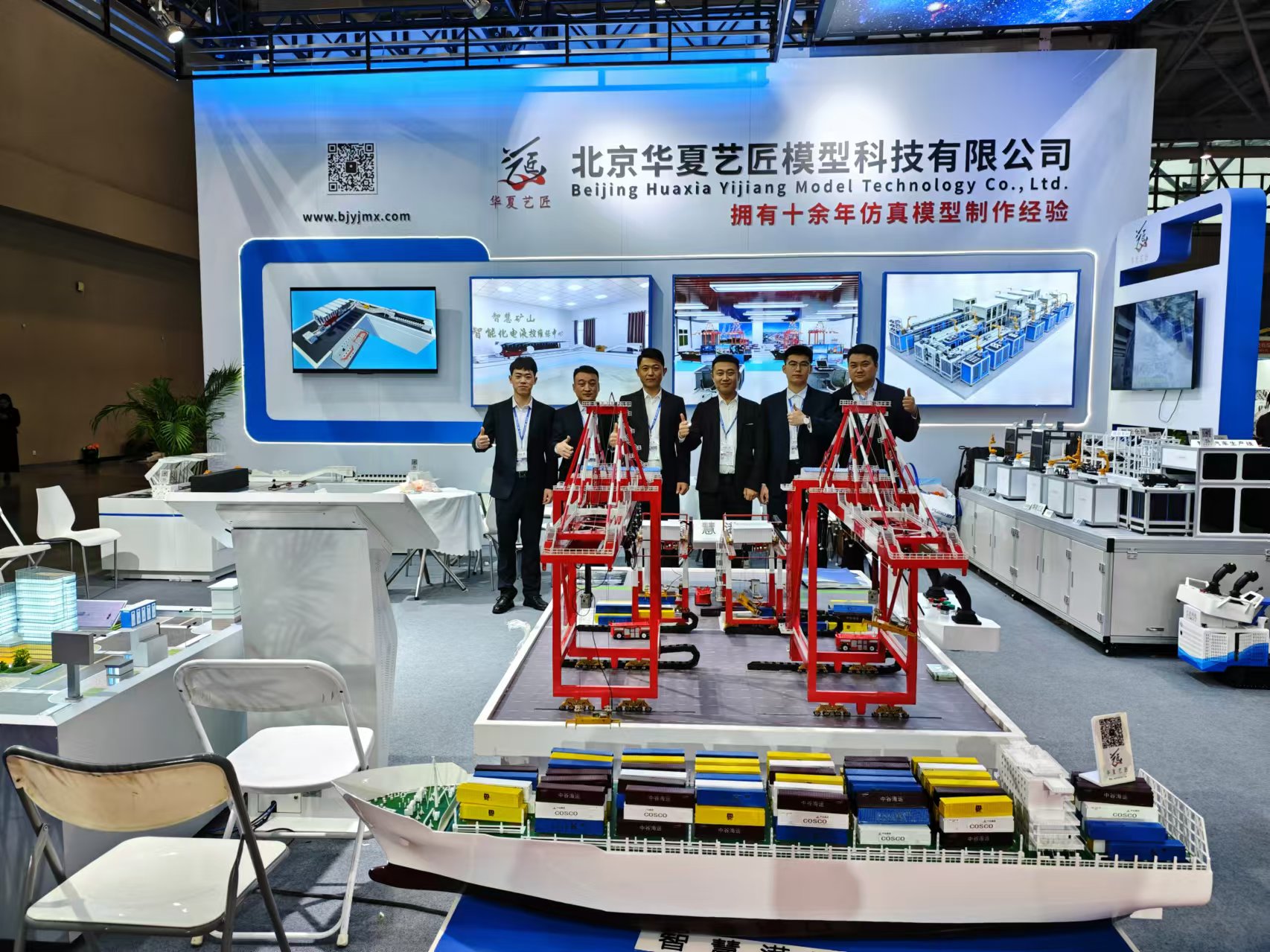
码头前沿:2 台自动化岸桥(带自动对位激光传感器模型)+1 艘万吨级自动化集装箱船(可动态展示舱位分配)
水平运输:8-10 台 AGV 模型(带磁导航 / 激光导航标识,支持沿预设轨道自主行驶,速度可调)
堆场区:三层自动化立体堆场(ARMG 模型,可实现无人堆取箱,升降 / 平移动作可视化)
控制中心:新增智能调度显示屏,实时显示 AGV 任务状态、作业进度动态数据
动态演示功能
全流程动态演示:船舶靠泊→自动化岸桥卸箱→AGV 动态运输→ARMG 堆存→AGV 疏运,全程无需人工干预
手动 / 自动双模式:支持手动操控单设备动态运行(如 AGV 路径调整),或启动自动模式演示完整流程
故障动态模拟:可触发 AGV 拥堵、岸桥故障等场景,演示智能调度系统的动态应急调整
三、动态教学实施体系
(一)梯度化动态教学模块
教学阶段 | 动态教学内容 | 模型应用方式 |
动态认知 | 自动化设备运动轨迹、全流程动态演示 | 沙盘自动演示 + 虚拟场景慢放观察 |
算法实训 | 调度参数调整(如 AGV 数量、优先级)→ 动态效果对比 | 虚拟系统算法实操 + 沙盘结果反馈 |
联动实训 | 虚拟调整调度方案→ 沙盘设备实时响应 | 虚实双端同步操作 + 动态数据记录 |
动态考核 | 自动化作业效率优化、故障动态处置能力 | 虚拟系统实时评分 + 沙盘动态操作答辩 |
(二)自动化特色思政融合
动态数据对比:实时展示振华重工自动化岸桥全球市场占有率(≥70%),动态生成国产化设备应用地图
场景化感悟:模拟 “绿色自动化港口”,动态显示能耗下降数据(如自动化模式较传统模式能耗降低 30%)
技术自信培养:演示我国自主研发的 AGV 调度系统(如上海港 “东海之滨” 系统),动态展示核心算法优势
四、动态技术支撑与应用
硬件升级配置
虚拟系统:GPU(RTX 3060 及以上)+ 数据采集卡(支持实时数据传输)
沙盘模型:AGV 驱动电机(步进电机,转速 0-5r/s 可调)+ 无线通信模块(WiFi 6)+ 动态指示灯(显示设备工作状态)
动态教学场景
课程教学:《智能港口运营管理》《自动化物流系统》等课程的动态原理教学
技能培训:港口自动化设备操作员岗前实训、智能调度系统运维培训
展示交流:物流装备展、职业教育成果展示中的自动化流程动态演示